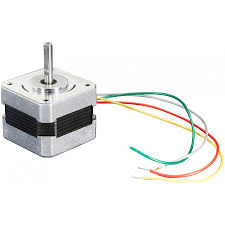
Motor
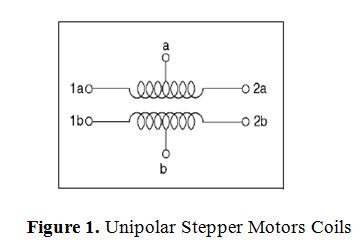
Unipolar stepper motor
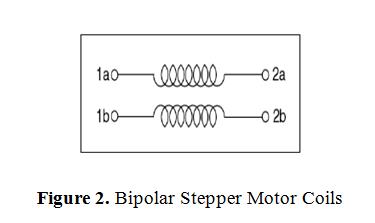
Bipolar Stepper Motor
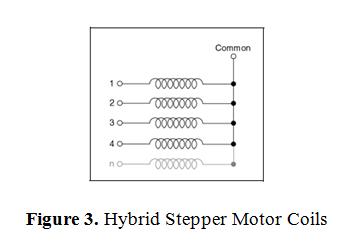
Variable Reluctance stepper motor (hybrid stepper motors)
Driving Unipolar Stepper Motors
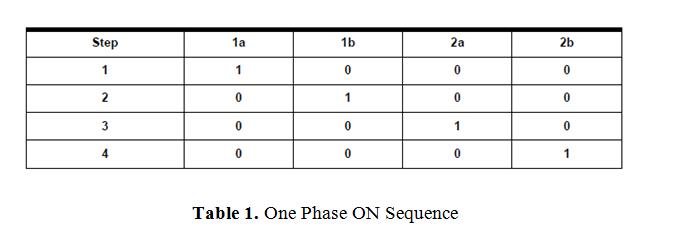


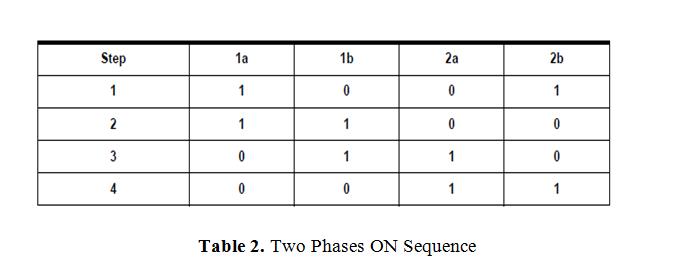
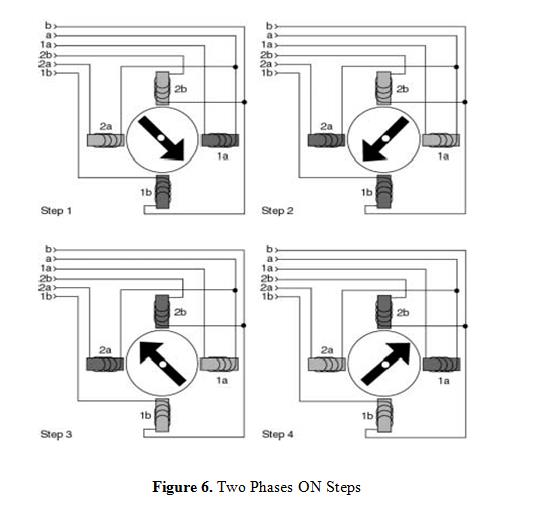
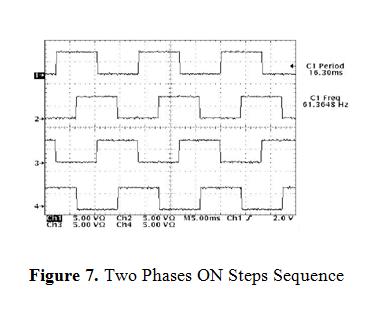
Two Phases ON Mode (Alternate Full step Mode)
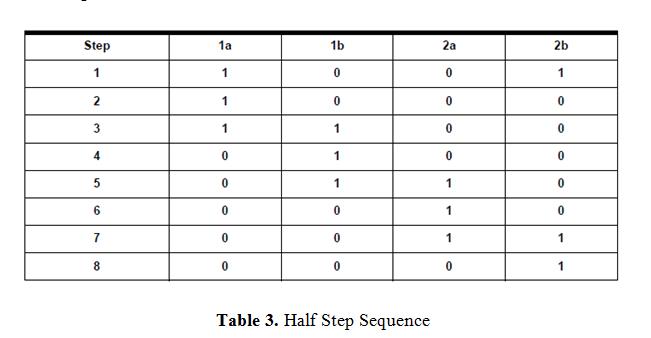
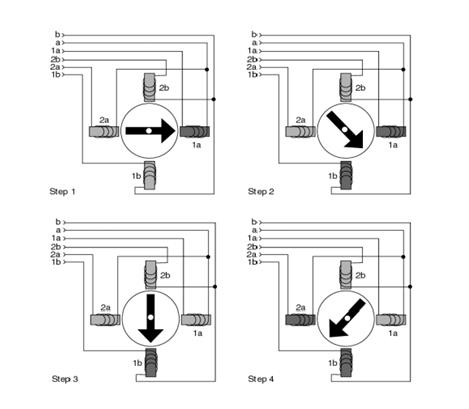
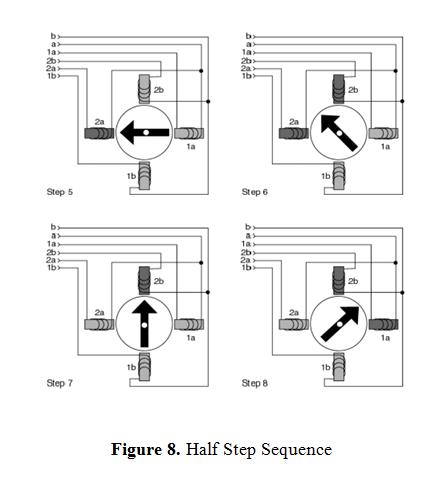
Half Step Mode

Application:
1. They are relevant in consumer office equipment such as printers, plotters, copiers, and scanners.
/* Name : main.c
* Purpose : Source code for interface Stepper Motor with 8051 Microcontroller (AT89C52)
* Author : vijayaraja R
* Date : 2014-01-22
* Website : www.gemicates.org
* Revision : None
*/
/**** Full step drive Mode****/
#include <REGX52.H>
#include<stdio.h>
#define motor P2
void delay(int sec);
void main() //main function
{
do
{
motor = 0x03; //0011
delay(100);
motor = 0x06; //0110
delay(100);
motor = 0x0C; //1100
delay(100);
motor = 0x09; //1001
delay(100);
}
while(1);
}
void delay(int sec) //Function provide msec delay
{
int i,j;
for(i=0;i<sec;i++)
for(j=0;j<1000;j++);
}
/* Name : main.c
* Purpose : Source code for interface Stepper Motor with 8051 Microcontroller (AT89C52)
* Author : vijayaraja R
* Date : 2014-01-22
* Website : www.gemicates.org
* Revision : None
*/
/**** Half Drive Stepping Mode ****/
#include <REGX52.H>
sfr stepper=0xA0; // GPIO P2 declaration
void delay(unsigned int count)
{
int i,j;
for(i=0;i<count;i++)
for(j=0;j<1025;j++);
}
void main() // main function
{
while(1)
{
stepper=0x01;
delay(100);
stepper=0x03;
delay(100);
stepper=0x02;
delay(100);
stepper=0x06;
delay(100);
stepper=0x04;
delay(100);
stepper=0x0C;
delay(100);
stepper=0x08;
delay(100);
stepper=0x09;
delay(100);
}
}
/* Name : main.c
* Purpose : Source code for interface Stepper Motor with 8051 Microcontroller (AT89C52)
* Author : vijayaraja R
* Date : 2014-01-17
* Website : www.gemicates.org
* Revision : None
*/
/**** Wave Drive Stepping Mode****/
/******Single-Coil Excitation******/
#include <REGX52.H>
#include<stdio.h>
#define motor P2
void delay(int sec);
void main() // main function
{
do
{
motor=0x01; // 0001
delay(1000);
motor=0x02; // 0010
delay(1000);
motor=0x04; // 0100
delay(1000);
motor=0x08; // 1000
delay(1000);
}
while(1);
}
void delay(int sec) // Function provide msec delay
{
int i,j;
for(i=0;i<sec;i++)
{
for(j=0;j<100;j++)
{}
}
}
/* Name : main.c
* Purpose : Source code for interface Bipolar Stepper Motor with 8051(AT89C52).
* Author : Gemicates
* Date : 2014-01-22
* Website : www.gemicates.org
* Revision : None
*/
/**** Bipolar Stepper Motor ****/
#include <REGX52.H>
sfr stepper=0xA0; // GPIO P2 declaration
void delay(int);
void main()
{
do
{
stepper=0x01; //0001
delay(1000);
stepper=0x04; //0100
delay(1000);
stepper=0x02; //0010
delay(1000);
stepper=0x08; //1000
delay(1000);
}while(1);
}
void delay(int sec)
{
int i,j;
for(i=0;i<sec;i++)
{
for(j=0;j<100;j++)
{}
}
}

Bipolar stepper motor interfacing with 8051

Unipolar stepper motor (Full step drive) interfacing with 8051